| (30) |
1. Учет рассогласования.
Скорость рассогласования рассчитывается по формуле:
 |
(31) |
Для A коэффициент ![]() = 0.75,
для Z коэффициент
= 0.75,
для Z коэффициент ![]() = 0.5.
= 0.5.
На рисункaх представлена зависимость скорости V от рассогласования
![]() для A и Z.
для A и Z.
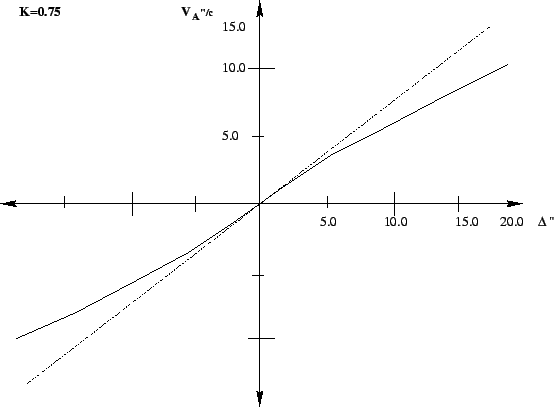
Рис.2. Зависимость скорости V от рассогласования ![]() (для A).
(для A).
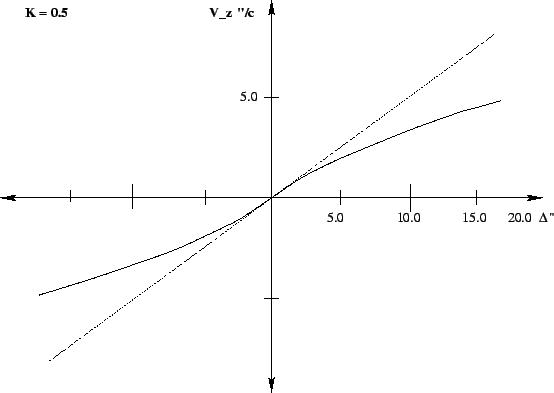
Рис.3. Зависимость скорости V от рассогласования ![]() (для Z).
(для Z).
2. Расчет поправки скорости привода ( изодром).
Поправка скорости привода рассчитывается по формуле:
| (32) |
Существуют еще внутренние критерии расчета изодрома, которые должны
определять вошла ли система в нормальный режим слежения по
рассогласованию (т.е. ![]() - "хорошие"), иначе сохраняется
текущее значение
- "хорошие"), иначе сохраняется
текущее значение ![]() . Этими критериями являются следующие условия:
. Этими критериями являются следующие условия:
Если расчет изодрома включается первый раз после перенаведения телескопа,
то сначала делается "быстрый" расчет с коэффициентом умноженым на
три (т.е.
![]() и, соответственно,
и, соответственно,
![]() ).
).
Условием перехода на нормальный расчет является появление рассогласований разного знака. Очень маленькие (формальные) рассогласования не учитываются.
Примечание: после замены старых приводов на SEW-привода эта поправка должна быть все время пренебрежимо малой, теперь она фактически служит для контроля правильной работы привода.
3. Работа цифрового фильтра.
Если цифровой фильтр выключен, то ![]() рассчитывается по прежней
формуле (см. с.
рассчитывается по прежней
формуле (см. с. ![]() ).
Если цифровой фильтр включен, то последние двадцать значений
).
Если цифровой фильтр включен, то последние двадцать значений ![]() (т.е. за 2 секунды) умножаются на коэффициенты цифрового фильтра и
суммируются. Полученное значение считается фильтрованным рассогласованием.
Коэффициенты фильтра рассчитаны по другой программе так, чтобы получился
режекторный фильтр с подавлением более чем в пять раз полосы частот
0.6 - 1.0 Гц. Цель включения цифрового фильтра - не провоцировать колебаний телескопа
на главной резонансной частоте со стороны управления.
(т.е. за 2 секунды) умножаются на коэффициенты цифрового фильтра и
суммируются. Полученное значение считается фильтрованным рассогласованием.
Коэффициенты фильтра рассчитаны по другой программе так, чтобы получился
режекторный фильтр с подавлением более чем в пять раз полосы частот
0.6 - 1.0 Гц. Цель включения цифрового фильтра - не провоцировать колебаний телескопа
на главной резонансной частоте со стороны управления.
Примечание: после перехода к получению значений угловых датчиков A и Z от PEP-контроллеров по CAN-шине, этот режим нормально выключен.
Если рассогласование, по какой-то причине, увеличилось до
![]() то фаза слежение возвратится в фазу переезд на объект.
то фаза слежение возвратится в фазу переезд на объект.
Надпись в интерфейсе оператора - ошибка в допуске
означает, что в течение двух секунд рассогласования не выходят за
![]() (1.5 дискрета датчика).
(1.5 дискрета датчика).