2014г.
Новая система управления Цейсс-1000 разрабатывалась начиная с 2008-го года. До 2010-го выполнялись подготовительные работы в лабораторных условиях. В 2011-м году проводились первые пробные наблюдения с реальным телескопом. По их результатам результатам в течение 2012-го года система доводилась до эксплуатационного варианта. Система находится в штатной эксплуатации с лета 2013 года.
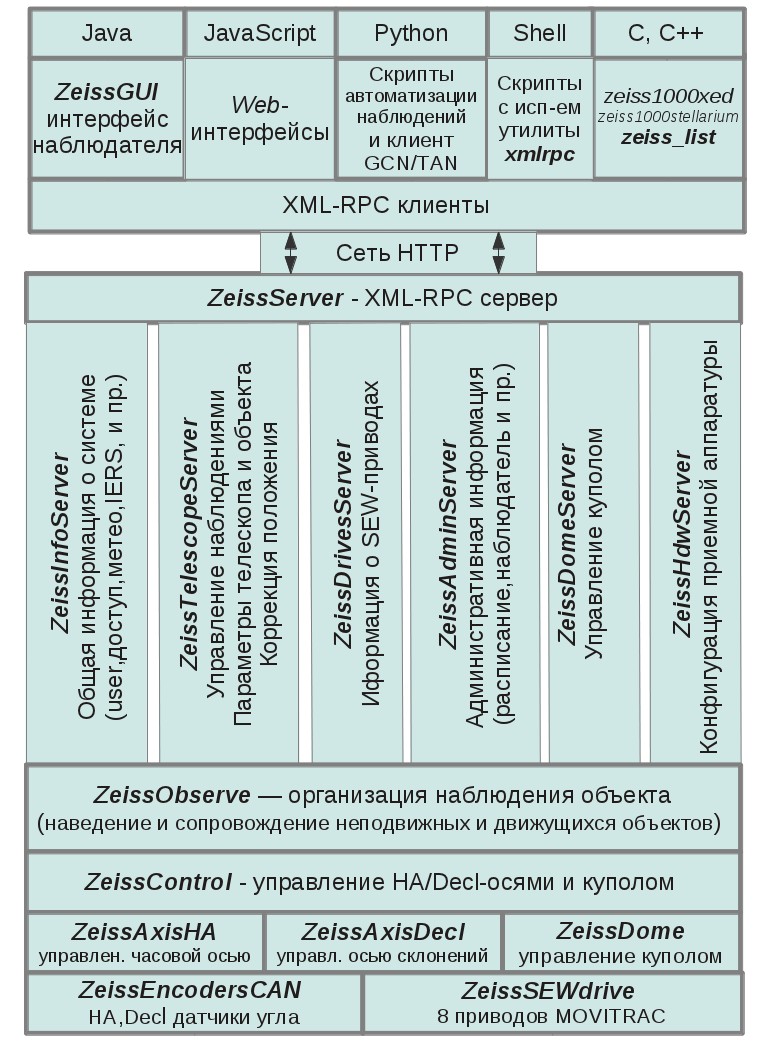
Реализован архитектурный принцип «клиент-сервер». Главная часть МО выполнена как сетевой сервер на Java под ОС Linux. Она загружается вместе с ней и работает непрерывно. Клиентские приложения, разработанные в 2010-2014 годах, написаны на разных языках программирования.
Главная часть МО загружается вместе с ОС Linux и работает непрерывно. Она разработана как XML-RPC сервер. Для реализации базовых сервисов используется пакет ws/xmlrpc для Java из проекта Apache.
Протокол XML-RPC работает поверх стандартного HTTP. Это один из первых протоколов Web-сервисов. Он достаточно старый и распространенный. Поддержка его имеется для большинства языков и ОС. Это позволяет разрабатывать клиентские приложения на разных языках в разных ОС. Реально использовались Java, JavaScript, Python, C, C++. Все это может работать с разных компьютеров в локальной сети.
Серверная часть системы управления имеет иерархическую структуру. Ее можно разделить на уровни по принципу: компоненты верхних уровней создают и используют те что ниже. Представленные на схеме названия ее частей это имена реальных Java-классов. Разумеется на схеме представлены не все, а только самые важные компоненты системы управления.
Поскольку протокол XML-RPC работает поверх стандартного HTTP, для сетевой идентификации пользователей используется стандартная авторизация заложенная в протоколе HTTP. Со стороны системы управления она подключена к основному серверу ZeissServer. Проверяется каждый запрос. Результатом идентификации является уровень доступа от 0 до 5. Нуль означает отсутствие идентификации.
Каждому пользователю приписывается уровень доступа от 1 до 5 который определяет какие действия он может выполнять. Уровень 1 — только просмотр состояния, 2 — плюс ввод координат, 3 — простой наблюдатель, 4 — опытный наблюдатель, 5 — администратор системы.
Все зарегистрированные у ZeissServer суб-серверы могут проверить уровень доступа обращения к ним, и либо выполнить команду, либо отказать в обслуживании. Клиент должен знать и в каждом обращении пересылать имя и пароль пользователя. Обычно они вписываются в URL обращения к XML-RPC-серверу (http://user:passwd@hostname:8088).
В классе организации наблюдения ZeissObserv для расчета и хранения позиционных данных используются три одинаковых представителя класса ScopeObject: Telescope, Object и Input. Каждый представляет все типы координатных данных и расчетов:

Сравнение Object и Telescope выполняется на уровне энкодеров и дает текущее рассогласование.
Все координатные расчеты выполняются с использованием библиотеки SLALIB (автор Patrick Wallace), которая оформлена в виде shared-библиотеки и подключена к Java-программам сервера через JNI-интерфейс.
Своей службы времени на БТА и Цейсс-1000 нет. Используется системное время ОС Linux. Это UTC которое синхронизируется системным сервером ntpd по протоколу NTP с сервером на ННП. Нормального NTP-сервера с GPS на ВНП пока что нет.
Пересчет UTC в среднее (mean) и истинное (apparent) звездное время происходит во время координатных расчетов в Telescope, Object и Input через функции библиотеки SLALIB.
Параметры Службы Вращения Земли (IERS) сервер берет из файла ser7.dat. Это поправка к UTC и положение земного полюса. На БТА этот файл должны периодически скачивать операторы. На Цейсс-1000 их нет. Поэтому при старте сервер проверяет дату этого файла и если он старше недели автоматом запускает скачивание его с сайта IERS. В будущем, если сервер будет работать месяцами без перезагрузки, эту проверку надо будет сделать периодической.
Метеоданные необходимы для расчета рефракции. Сервер сначала пытается извлечь их сайта метеостанции Цейсс-1000 (Davis Vantage Pro) на этом же компьютере. При неудаче пытается получить их по стандартному сетевому интерфейсу АСУ БТА.
Также как и на БТА учет метеоданных блокируется во время ведения объекта чтобы не получить помех от их изменения.
 На
телескопе установлены угловые датчики фирмы FRABA подключенные
прямо к CAN-шине. Протокол доступа — CANopen (DS301V4.0
Profile:DS406, C6-class). Для обмена с ними разработан Java-класс
ZeissEncodersCAN имитирующий пакеты протокола CANopen.
На
телескопе установлены угловые датчики фирмы FRABA подключенные
прямо к CAN-шине. Протокол доступа — CANopen (DS301V4.0
Profile:DS406, C6-class). Для обмена с ними разработан Java-класс
ZeissEncodersCAN имитирующий пакеты протокола CANopen.
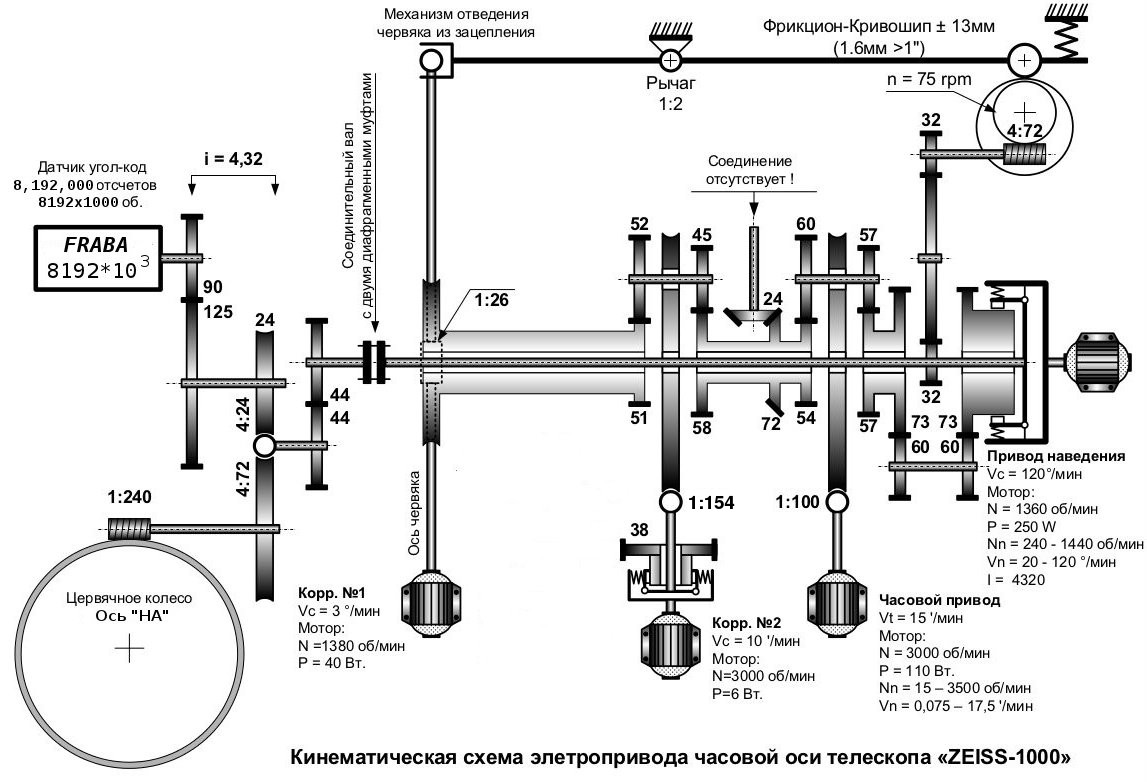
Датчики многооборотные. Один оборот кодируется 13-ю разрядами. Они
установлены на место старых. Передаточные числа между осями телескопа
и датчиками (см. схемы ниже)
![]() для часового угла и
для часового угла и
![]() для склонений. Т.е. датчики делают 1000 оборотов на оборот оси
телескопа. Соответственно дискрет датчиков:
для склонений. Т.е. датчики делают 1000 оборотов на оборот оси
телескопа. Соответственно дискрет датчиков:![]() .
.
Поскольку датчики поставлены на место старых, т.е. через редукторы (см. схемы ниже), их реальная точность определяется качеством этих редукторов. После запуска новой системы управления был проведен эксперимент с целью попытаться оценить «вклад» редукторов в реальную точность датчиков. Двигатели телескопа включались на малую постоянную скорость, положения по осям записывались в файл с периодичностью раз в секунду. Затем из этих данных вычиталась линейная регрессия. Оставались периодические вариации скорости вращения датчиков. Для их привязки к конкретным осям редуктора вычислялся Фурье-спектр. Оказалось, что «вклад» редукторов примерно 0.6" по часовому углу и около 1" по склонению (подробнее см. в отчете за 2013г).
В интерфейсе наблюдателя ZeissGUI реализована панель Encdrs для представления реальных и расчетных положений угловых датчиков
Часовая ось телескопа управляется 4-мя двигателями, а ось склонений — 3-мя. Один двигатель маршевый для быстрого наведения он сидит прямо на главной оси редуктора. Остальные - для коррекции и часового ведения. Их вращение складывается через сложный дифференциальный редуктор. Ниже приводятся кинематические схемы этих редукторов восстановленные С.Драбеком на основе чертежей и практических исследований.
По
этим схемам были выведены (и заложены в ZeissSEWdrive) формулы
передаточных отношений от двигателей к осям телескопа.
Передача от главных червяков на оси телескопа
![]()
Передача от валов двигателей наведения
 Диапазон
скоростей 240÷1440rpm
→1200÷7200"/сек
=20' ÷2º/сек
Диапазон
скоростей 240÷1440rpm
→1200÷7200"/сек
=20' ÷2º/сек
Передача для асинхронного двигателя Коррекция1 HA
 Диапазон
скоростей 20÷1500rpm→2.6÷197.5"/сек
Диапазон
скоростей 20÷1500rpm→2.6÷197.5"/сек
Передача для синхронного двигателя Коррекция2 HA
 Диапазон
скоростей 20÷3000rpm→0.14÷20.96"/сек
Диапазон
скоростей 20÷3000rpm→0.14÷20.96"/сек
Передача для синхронного двигателя часового привода Скорость 3000rpm→15"/сек
Скорость 3000rpm→15"/сек
Кинематическая схема оси склонений несколько проще.

Передача для асинхронного двигателя Коррекция1 Dec
 Диапазон
скоростей 20÷1500rpm→2.6÷196.8"/сек
Диапазон
скоростей 20÷1500rpm→2.6÷196.8"/сек
Передача для синхронного двигателя Коррекция2 Dec
 Диапазон
скоростей 20÷3000rpm→0.16÷23.28"/сек
Диапазон
скоростей 20÷3000rpm→0.16÷23.28"/сек
Исходно ставилась задача сопровождения быстро движущихся объектов (ИЗС) двигателями коррекции. Их диапазоны скоростей существенно пересекаются, что делает задачу решаемой. К сожалению двигатель наведения тут использовать нельзя т.к. его минимальная скорость значительно выше максимальной скорости коррекции и кроме того его нужно останавливать чтобы сработала механическая муфта подключения дифференциального редуктора.
Управление такой двигательной установкой для решения этих задач представляло серьезную проблему. Разработан алгоритм одновременной работы 2-х двигателей коррекции на осях, позволяющий плавно менять скорость в полном диапазоне. Кроме того он и несколько расширяет этот диапазон скоростей. На часовой оси при малых изменениях скорости используется синхронный двигатель часового ведения т.к. он самый точный. Эти алгоритмы реализованы в классах организующих движение по осям ZeissAxisHA и ZeissAxisDecl.
Note: в специальном режиме «сервисный инженер» (имя пользователя meh) эти алгоритмы не используется, двигатели коррекции включаются раздельно — каждый в своем диапазоне скоростей.
Каждый SEW-привод управляется своим Jаva-объектом типа ZeissSEWdrive. Все они работают параллельно и реализуют обмен по CAN-шине по протоколу фирмы SEW каждый со своим приводом.
В интерфейсе наблюдателя реализована панель Drives для представления состояния приводов.
Управление приводом купола реализовано в классе ZeissDome. Оно происходит через модифицированный вариант класса ZeissSEWdrive. В который добавлено считывание кода АЦП аналогового входа AI1 SEW-контроллера. К этому входу подключен однооборотный аналоговый датчик угла. Он установлен на двигатель через редуктор 1:70. К сожалению реальная редукция на купол оказалась 12:834 = 1:69.5. Это приводит к смещению нуль-пункта датчика на ~2.6º при полном обороте купола. Программа ведет и сохраняет в файле Dome_shift.dgr текущее накопленное смещение нуль-пункта. Изменение нуль-пункта производится при резком изменении напряжения на датчике с нуля до максимального (сейчас 9.17V) или обратно. Дискрет датчика ≈0.4º.
Последние два режима отличаются только источником координат HA,Dec с которыми нужно согласовать купол.
Из-за нецентрального положения трубы телескопа в подкупольном пространстве, согласование положения купола с телескопом не является тривиальной задачей. Азимуты телескопа и купола могут отличаться на любую величину от 0 до 180º (например при прохождении околозенитной области).

Разработан
алгоритм, реализованный в классе ZeissDome, который непрерывно
решает задачу из аналитической геометрии о нахождении точки
пересечения оси трубы телескопа со сферой купола. Проекция этой точки
на горизонтальную плоскость дает азимут необходимого положения
купола. Таким образом выполняется преобразование HA,Dec
телескопа→азимут купола.
Чтобы не слишком часто «дергать» привод, программа включает движение если рассогласование между необходимым и измеренным положением достигает ~1.6º (4 дискрета датчика). Такая точность согласования трубы телескопа с забралом купола считается достаточной.
Скорость движения купола постоянная ~0.85º/сек (1100rpm на двигателе). Движение выключается при входе входе в зону ~±0.8º (2 дискрета датчика).
В интерфейсе наблюдателя ZeissGUI реализована панель Dome для управления куполом.
Направления осей вращения телескопов всегда имеют статические ошибки и, кроме того, могут меняться во время работы из-за упругих гнутий конструкций. Поэтому для точного наведения на объект система управления должна содержать формулы коррекции отражающие специфику конструкции конкретного телескопа. Например в системе управления БТА это называется СКН (Система Коррекции Наведения). Коэффициенты в этих формулах отражают текущее состояние инструмента. Они определяются по результатам технических наблюдений звезд с точными координатами.
По результатам технических наблюдений и их обработки, были разработаны формулы коррекции наведения телескопа Цейсс-1000 (подробнее об этом см. в отчете за 2012-й год). Они основаны на классических формулах для экваториальных монтировок (см. например: http://www.tpsoft.demon.co.uk/pointing.htm) плюс гармоники за эксцентриситет и эллиптичность главных червячных колес.
Подробнее о формулах и коэффициентах можно прочесть в описании панели PM интерфейса ZeissGUI.
Для альт-азимутальных монтировок современных телескопов ограничения на повороты осей имеют тривиальный характер — просто аппаратные и/или программные концевики по координатам A и Z. Можно сказать что доступная область имеет прямоугольную форму в координатах A и Z. Управление скоростью может быть независимым по каждой координате.
Для экваториальных монтировок все значительно сложнее. Доступная область в координатах HA и Dec ограничена кривой линией. Аппаратные концевики невозможны (хотя на Цейсс-1000 такие попытки предпринимались). Остаются программные алгоритмы в системе управления. При этом должны учитываться как обычный режим работы, так и с перекладкой телескопа.
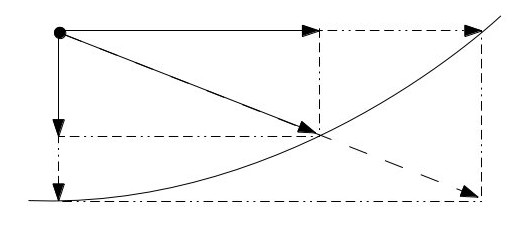
В
программе должна быть определена линия ограничивающая доступную
область. Программа должна следить за расстоянием до криволинейной
границы в направлении вектора скорости, чтобы плавно остановиться и
не переехать через эту границу. Если все таки телескоп оказался на
границе или за ней, программа должна блокировать все направления
движения кроме позволяющих вернутся в доступную область.
Таблица ограничений по всем этим причинам записана в в файле /usr/local/ztcs/ZeissHorizon.tab. В первом столбце «Decl» склонения от -46 до 225 через один градус. Значения <90 — область без перекладки, >90 — с перекладкой. Для каждого склонения в следующих двух столбцах «EastHA» и «WestHA» записаны ограничения по доступным часовым углам.
Таблица загружается в память сервера при старте. При этом сервер записывает в файл restrDecl.tab обратную таблицу: «HourAng» → «Decl.Bot.» «Decl.Top».
Note: ограничение в направлении на юг сейчас Dec>-36º, но в специальном режиме «сервисный инженер» (имя пользователя meh) можно опускать трубу вплоть до горизонтального положения.
Графическое представление доступной области можно видеть на панели Encdrs интерфейса ZeissGUI.
Для представления линии горизонта в программах zeiss_list и XEphem, файл /usr/local/ztcs/ZeissHorizon.tab был переработан в два файла: zeiss_horizon_dir.hzn — для нормальной моды наблюдений и zeiss_horizon_rev.hzn — для работы с перекладкой.
На телескопе Цейсс-1000 аппаратура регистрации в фокусе Кассегрен подвешивается сзади трубы и увеличивает ее габарит. Кроме того кабели традиционно не подвешиваются к трубе, а свисают вниз и просто лежат на полу. Поэтому всегда существовала опасность зацепиться выступающими частями аппаратуры или порвать кабели.
Для того чтобы уменьшить вероятность таких неприятностей, был разработан, и реализован в системе управления, алгоритм запрещенных областей. Область должна задаваться замкнутой выпуклой ломаной линией в координатах HA,Dec. Алгоритм не должен позволять заезжать внутрь запрещенных областей. Сами области должны определятся на практике лицами ответственными за эксплуатацию телескопа.
Описания запрещенных областей находятся в файлах конфигурации методов наблюдений с именами типа: ПРИБОР+ПРИЕМНИК+МАТОБЕСПЕЧЕНИЕ.conf в справочнике /usr/local/ztcs/. Количество областей может быть от 0 до 10. Имя параметра задающего область должно начинаться с «region_». Каждая точка это координаты через запятую. Точки линии разделяются «;». Т.е. строка описания выглядит как «region_XXXXX=HA1,Dec1;HA2,Dec2;...;HAn,Decn» где HAi, в часах, а Deci в градусах. Все значения это показания энкодеров телескопа. Последняя точка будет соединена с первой для получения замкнутой линии.
Например в файле /usr/local/ztcs/Photometer+CCD+DinaSystem.conf для фотометра с ПЗС-матрицей записано:
region_BackEnd=22.33,-22.5;23.2,-22.5;23.2,-45.0;22.33,-45.0 region_Reverse=12.8,225.0;12.8,190.0;14.0,180;17.9,150.;17.9,255.
Первая область это ограничение для самой ПЗС-марицы: нельзя между часовыми углами 22.33h и 23.2h опускаться ниже -22.5º по склонению. Вторая это ограничение по длине кабеля при работе с перекладкой.
Для нормальной организации наблюдений на телескопе и предоставления корректных мета-данных системам регистрации без излишней нагрузки на наблюдателя, в систему управления включена подсистема администрирования наблюдениями. Она реализована в классе административного суб-сервера ZeissAdminServer. Административная информация включает списки наблюдателей, программ наблюдений, авторов программ, вариантов аппаратуры регистрации, а также расписание наблюдений. Последнее это список сетов наблюдений. Описание каждого сета это: дата начала сета, используемая аппаратура, список возможных наблюдателей, список программ наблюдений и их авторов.
В памяти сервера эта информация существует в виде структуры DOM. Она загружается в память системы при старте из XML-файла /usr/local/ztcs/ZeissAdmin.xml. Ее редактирование выполняется через Web-интерфейс пользователем с уровнем доступа 5 (администратором телескопа).
Панель Admin в интерфейсе наблюдателя ZeissGUI позволяет использовать административную информацию во время наблюдений. Для этого в системе есть понятие «текущий сет» (Currend Set). Информация из него идет и в прототип FITS-шапки, которая доступна в локальной сети на Windows-ресурсе \\ztcs\ZEISS\ZFITS.HDR, для включения в FITS-файлы системы регистрации.
Клиентские приложения, разработанные в 2010-2014 годах, написаны на нескольких языках программирования.
Основной интерфейс для наблюдателей и инженеров ZeissGUI написан с использованием того же пакета реализации протокола XML-RPC на Java (ws/xmlrpc) что и сервер. Это графический клиент взаимодействующий по локальной сети с сервером системы управления Цейсс-1000. Он позволяет получать основную информацию о состоянии системы и выполнять управление работой телескопа во время наблюдений или сервисного обслуживания. Теоретически он может запускаться на любой машине в локальной сети под разными ОС, если в них установлена исполняемая система Java (JVM). И даже предусмотрена возможность в будущем запускать его как Java-applet в Web-браузере.
Клиент ZeissOld имитирует внешний интерфейс старой программы управления (через файлы на Windows-ресурсе \\ztcs\ZEISS\ ) и таким образом обеспечивает работу старых программ: DinaSystem - сбор с матрицы 2K на фотометре и UAGS; tvguide — гидирование по подсмотру UAGS; Web-интерфейс 20см ТВ-гида.
Клиент ZeissFITSheader непрерывно обновляет прототип FITS-шапки на Windows-ресурсе \\ztcs\ZEISS\ZFITS.HDR для использования в будущих системах сбора , прототип содержит всю административную, телескопную и метео информацию в корректном FITS-стандарте, собственно остается только добавить параметры системы сбора.
Доработан сторонний модуль rpc.js с использованием Ajax (XMLHttpRequest). С его помощью разработаны Web-интерфейсы:
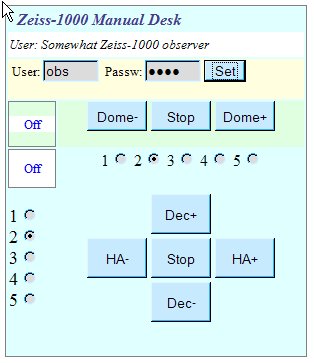
Web-приложение инженерного пульта которое может работать на мобильных гаджетах с WiFi под куполом телескопа. Приложение проверено на основных браузерах в Android, iOS, Linux, Windows.
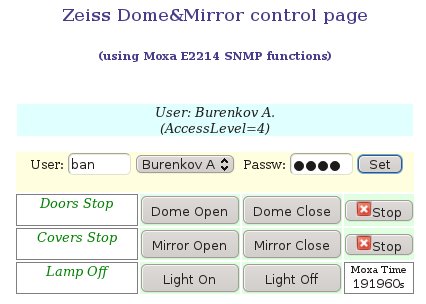
Web-интерфейс для удаленного управления забралом купола и крышками зеркала.
Web-приложение администратора на Цейсс-1000, которое предназначено для редактирования и просмотра административной информации в системе управления телескопа. Административная информация включает списки наблюдателей, программ наблюдений, авторов программ, вариантов аппаратуры регистрации, а также расписание наблюдений.
Note: эти Web-приложения вызываются с сайта компьютера системы управления , а XML-RPC сервер к которому они обращаются по Ajax имеет отличающийся URL. Современные браузеры, по соображениям безопасности, блокируют подобные «крос-серверные» обращения из Javascript. Необходимо чтобы в сервере было реализовано дополнение HTTP-протокола CORS (Cross-Origin Resource Sharing). К сожалению в используемом Apache XML-RPC (ws/xmlrpc) эта опция отсутствует. Java-класс org.apache.xmlrpc.webserver.Connection был доработан с включением поддержки CORS. Пока он загружается поверх основной библиотеки ws/xmlrpc, подменяя собой библиотечный.
Разработан скрипт ztcs_tycho2.py облегчающий технические наблюдения. Он по заданному положению на небе (HA/Decl) находит в каталоге Tycho-2 ближайшую на данный момент звезду и запускает наведение на нее.
Другой скрипт ztcs_diff.py применялся для исследования редукторов осей. Двигатели телескопа включались на малую постоянную скорость, положения по осям записывались в файл с периодичностью раз в секунду. Затем из этих данных вычиталась линейная регрессия. Оставались периодические вариации скорости вращения датчиков к которым применялся Фурье-анализ. Линии в полученных «спектрах» отождествлялись с периодами вращения конкретных валов в редукторах.
Для оперативного наведения телескопа по координатам GRB-событий, разработано клиентское программное обеспечение на языке Python для работы с системой серверов GCN/TAN (GRB Coordinates Network / Transient Astronomy Network) NASA. Разработка выполнена с использованием пакета pygcn.
Все файлы имеющие отношение к серверу системы управления расположены на компьютере системы управления ztcs в справочнике /usr/local/ztcs/.
ZeissServer.sh — командный скрипт для запуска или перезапуска сервера TCS Цейсс-1000 (используется в /etc/rc.d/rc.local)
ZeissServerStop.sh — командный скрипт для ручного останова сервера.
ZeissTCS.conf — основной файл параметров конфигурации сервера. Его содержимое на текущий момент:
#Zeiss TCS configuration parameters #Tue May 28 16:44:34 MSK 2013 iers.bulletinA=http\://maia.usno.navy.mil/ser7/ser7.dat http.proxyHost=relay.sao.ru http.proxyPort=8080 http.nonProxyHosts=*.sao.ru|localhost zeiss.latitude=157157.3 zeiss.longitude=149195.4 zeiss.height=2055.0 zeiss.horizonFile=./ZeissHorizon.tab zeiss.encodersType=CANopen #zeiss.encodersType=Sim zeiss.zeroCodeHA=129006 zeiss.zeroCodeDecl=1000641 zeiss.SEW7freq=0.9952898476 zeiss.parkHA=21\:40\:00.0 zeiss.parkDecl=+28\:30\:00.0 zeiss.Dome0=145.93 zeiss.parkDome=30.0 zeiss.pointingFile=ZeissPointing.conf zeiss.usersFile=ZeissUsers.conf zeiss.adminFile=ZeissAdmin.xml zeiss.serviceUser=meh
Photometer+CCD+DinaSystem.conf — конфигурация метода «Фотометр с ПЗС матрицей»
#Zeiss Acquisition Hardware configuration #Sat Dec 10 17:51:46 MSK 2011 fullname=Photometer+CCD+DinaSystem name=Photometer+CCD ident=CCD soft=DinaSystem v2.2 corrHA=0.0 corrDecl=0.0 posAngle=72.5 parkHA=22\:00\:00.0 parkDecl=+22\:00\:00.0 parkDome=33.0 region_BackEnd=22.33,-22.5;23.2,-22.5;23.2,-45.0;22.33,-45.0 region_Reverse=12.8,225.0;12.8,190.0;14.0,180;17.9,150.;17.9,255.
UAGS+CCD+DinaSystem.conf — конфигурация метода «Спектрограф UAGS»(порядок строк параметров в файлах конфигурации не важен, он меняется при каждом спасении измененных параметров)
#Zeiss Acquisition Hardware configuration #Wed Oct 08 00:12:41 GMT+04:00 2014 region_Reverse=18.001,90.2;17.999,90.2;17.999,225.0;18.001,225.0 name=UAGS+CCD region_BackEnd=18.01,4.7;23.2,4.7;23.2,-45.0;18.01,-45.0 parkDecl=+39\:00\:00.0 ident=UAGS corrDecl=-20.4 posAngle=0.0 parkHA=21\:40\:00.0 parkDome=33.0 soft=DinaSystem v2.2 corrHA=1.28 fullname=UAGS+CCD+DinaSystem
CEGS+CCD+DinaSystem.conf - конфигурация метода «Эшелле-спектрометр кудэ»
#Zeiss Acquisition Hardware configuration #Sun Jun 08 23:38:23 GMT+04:00 2014 name=CEGS+CCD parkDecl=+22\:00\:00.0 ident=CEGS1 corrDecl=-115.0 posAngle=0.0 parkHA=22\:00\:00.0 parkDome=33.0 soft=DinaSystem v2.2 corrHA=3.6 fullname=CEGS+CCD+DinaSystem
CEGS+PeltierCooledCCD+VLVSoft.conf — старый вариант метода «Эшелле-спектрометр кудэ»
ZeissAdmin.xml — XML-файл административных параметров
ZeissUsers.conf — список дополнительных (служебных) пользователей
#Zeiss main Users list (full observers list in Admin XML file) #Thu May 26 15:18:16 MSD 2011 admin=*****|5|Zeiss-1000 main Administrator vsher=*****|5|Shergin V.S. meh=*****|4|Zeiss service engineer obs=*****|3|Somewhat Zeiss-1000 observer user=*****|2|Zeiss-1000 user (Set coord.only) guest=guest|1|Guest user (Show only)
ZeissHorizon.tab — таблица ограничений области допустимых положений
ZeissPointing.conf — значения коэффициентов формул коррекции наведения
#Zeiss Pointing Model coefficients #Calculated by zeiss_lsqm74 (WITHOUT! reverse mode account) # IH, ..., DAF - only! # GWxxx - preserved from previos (May 2012) version #Thu Jul 25 22:01:28 GMT+04:00 2013 IH=-73.93 ID=31.19 CH=130.40 NP=1.25 MA=-12.47 ME=-66.09 TF=6.30 DAF=94.44 GWH1=31.70 GWH2=5.35 GWH2phi=3.8 GWD1=12.21 GWD1phi=65.0 GWD2=-4.45 GWD2phi=-20.0
Dome_shift.dgr — текущее накопленное смещение нуль-пункта положения купола.
ser7.dat — файл с данными Службы Вращения Земли (IERS), скачивается автоматически при старте сервера с сайта IERS.
lib*_jni.so — JNI-библиотеки написанные на C и подключаемые к серверу на Java.
ZeissServer.log — файл протокола работы сервера управления.
ZeissGUI.sh — командный скрипт старта интерфейса наблюдателя (обычно вызывается через ссылку /usr/local/bin/zgui).
fromhostname - командный скрипт определяющий с какого компьютера зашел пользователь (используется в ZeissGUI.sh).
zeiss1000xed, zeiss1000stellarium, zeiss_list — клиентские программы (см. выше), вызываются через ссылки в /usr/local/bin/.
Все это реализовано в стартовом файле ОС Linux (/etc/rc.d/rc.local), который в настоящий момент выглядит так:
#!/bin/sh # # This script will be executed *after* all the other init scripts. # You can put your own initialization stuff in here if you don't # want to do the full Sys V style init stuff. # Check: if no CAN-driver => load it (with parametes from /etc/modprobe.conf) [ -d /sys/module/can ] || modprobe can sleep 1 # If CAN Ok start Zeiss CAN I/O daemon [ -d /sys/module/can ] && cd /usr/local/sbin && ./zeiss_can_io_net >/var/log/zeiss_can_io.log 2>&1 & # Starting BTA TCS network daemon /usr/local/sbin/bta_control_net acs7.sao.ru >/var/log/bta_control_net.log 2>&1 & # Starting Zeiss-1000 TCS Server (cd /usr/local/ztcs; su vsher -c "./ZeissServer.sh simulator" >/dev/null 2>&1 ) & # Starting meteo-station daemon /usr/local/bin/wviewd_watching.sh >/dev/null 2>&1 & chmod a+r /dev/audio /dev/adsp /dev/dsp /dev/mixer chmod a+w /dev/mixer touch /var/lock/subsys/local
Также должен работать сервис wview метеостанции Vantage Pro.
Для доступа к устройствам на CAN-шине в управляющем компьютере ztcs установлена карта Adlink PCI-7841.
Для работы с этой картой в ядро системы установлен сторонний драйвер LinCAN (автор Pavel Pisa <pisa@cmp.felk.cvut.cz>).
Драйвер допускает использование только одной программой. Для одновременной параллельной работы нескольких программ с устройствами на CAN-шине разработаны библиотека can_io и CAN-сервер zeiss_can_io_net.
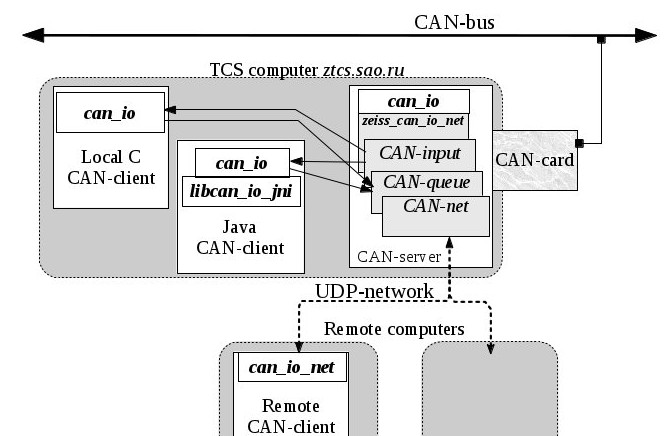
Модуль
can_io включается (компонуется) в программы написанные на
языке C. В нем реализованы интерфейсы обмена CAN-фреймами с
между CAN-клиентами и CAN-сервером. Для клиентов на Java
модуль can_io включен в JNI-библиотеку libcan_io_jni
и написан Java-класс CANio для ее подключения. Даемон
zeiss_can_io_net запускается
при старте системы. Он порождает (fork) процессы-копии
для получения (input) и отправки (queue) CAN-фреймов.
CAN-сервер также может организовывать и сетевой обмен CAN-фреймами ввиде UDP-пакетов. Для этого порождается еще один процесс взаимодействующий по сети со специальным вариантом клиентской библиотеки can_io_net. Сейчас эта возможность реально не используется.